Gyro Control
The gyroscope-control mainly uses the JavaScript eventlistener deviceorientation which returns alpha beta and gamma values. Depending on the devices orientation the movement instructions are calculatet for example like the following if the device is in portratit mode.
if (beta > 105) {
// For backward movemnt
move += 2; // 2
} else if (beta > 0 && beta < 75) {
// For forward movemnt
move += 1; // 1
}
if (gamma < -15 && gamma > -75) {
// For left movement
move += 3; // 3 4 5
} else if (gamma < 75 && gamma > 15) {
// For right movement
move += 6; // 6 7 8
}
The calculated number represents one instruction set: 1. Forward 2. Backwards 3. Left 4. Forward and left 5. Backwards and left 6. Right 7. Forward and right 8. Backward and right
Afterwards this value is put in a list which uses the Canvas control format ["Gyro", moveIntention, printing] and is send to the CanvasServer via HTTPRequest. The CanvasServer identifies based on the keyword Gyro if the instruction is such and calls the sendCommandsToRobot-function. Based on the instruction given it is then translated into ChalkBot command instructions and send to the ChalkBot.
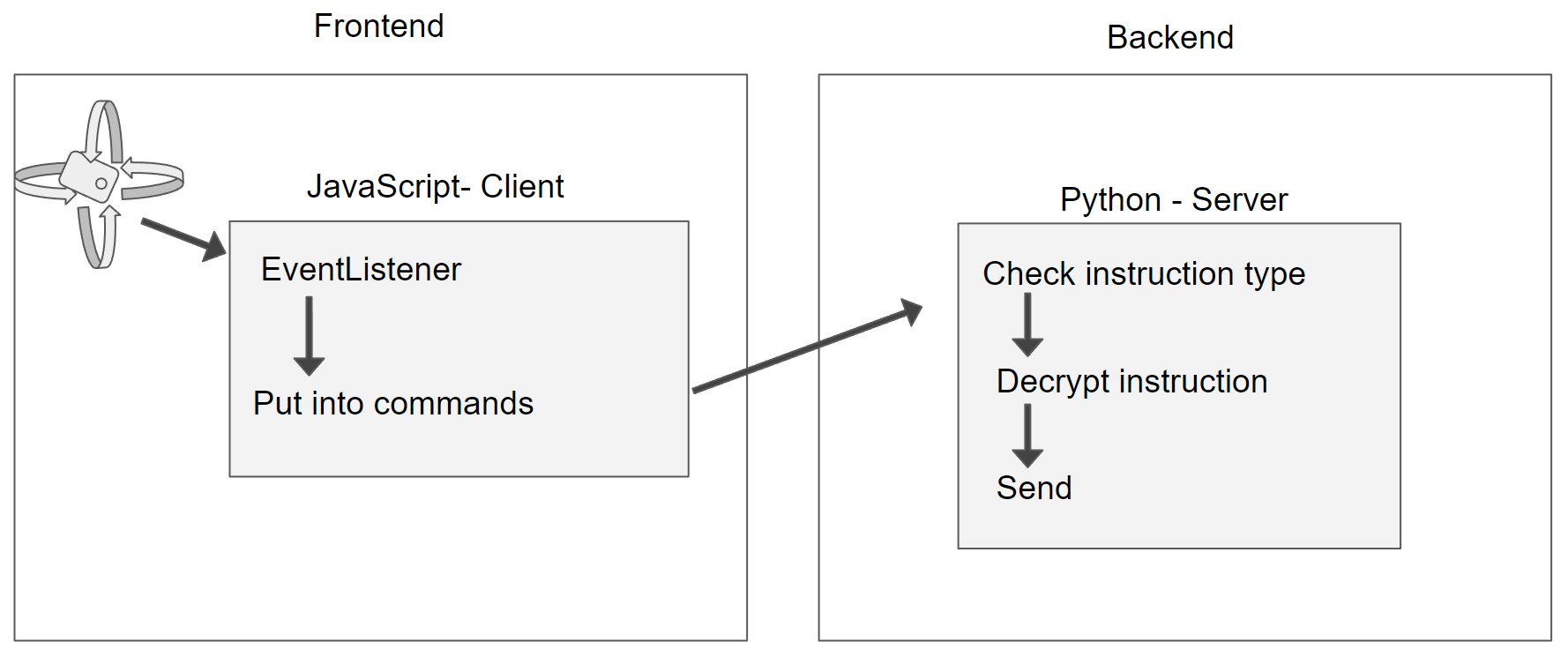 The image above presents the dataflow in a compact form.
The image above presents the dataflow in a compact form.